
Inhoudstafel
Inleiding
Welkom! Met deze webpagina willen we je op weg helpen en inspiratie bieden als je een van onze tandwielsets kocht. Zo kunnen we de informatie blijven aanvullen wanneer we toffe nieuwe mechanismen opstellen. Natuurlijk kan je ook gewoon lezen om bij te leren over tandwielmechanismen.
We pogen op deze pagina de basisconcepten te duiden en je de nodige zoekwoorden (in het Nederlands en het Engels) aan te reiken om zelf verder te zoeken. Daarnaast lichten we voor enkele minder voor de hand liggende constructies (samengestelde tandwielen, een planeetwielmechanisme) ook toe hoe je die met onze concrete set kan bouwen.
Wie de basisprincipes kent en gewoon naar leuke voorbeelden op zoek is, kan meteen naar de voorbeelden springen en naar interessante afbeeldingen scrollen. Als tandwielen echter eerder nieuw zijn of het even geleden is dat je er nog over las, raden we echter aan om toch even de terminologie te lezen alvorens je iets concreet gaat zoeken.
Dit is tot slot zeker geen vervanging van een handboek of cursus voor leerlingen. Wel kan een leerkracht deze pagina met vele diagrammen zeker gebruiken als aanzet om gevarieerde opgaven uit te werken. Voor sterke, gemotiveerde leerlingen kan het eventueel ook een bron zijn voor of een aanzet zijn tot een onderzoeksproject. Wil je deze pagina in die context offline ter beschikking hebben, dan kan je deze hier downloaden.
Onze set gebruiken
Het raster dat in onze tandwielsets bevat is (op zowel de grote enkele plaat als de puzzelplaatjes), is een zeshoekig rooster. Dit geeft je de mogelijkheid om vrij in drie richtingen (met onderlinge hoek van 60°) te werken, maar zorgt er ook voor dat het rooster horizontaal en verticaal niet helemaal gelijk is. Om de voorbeelden op deze pagina te kunnen nabouwen, dien je de plaat horizontaal (liggend formaat) te leggen, zodat de gaatjes gerangschikt staan zoals hieronder.

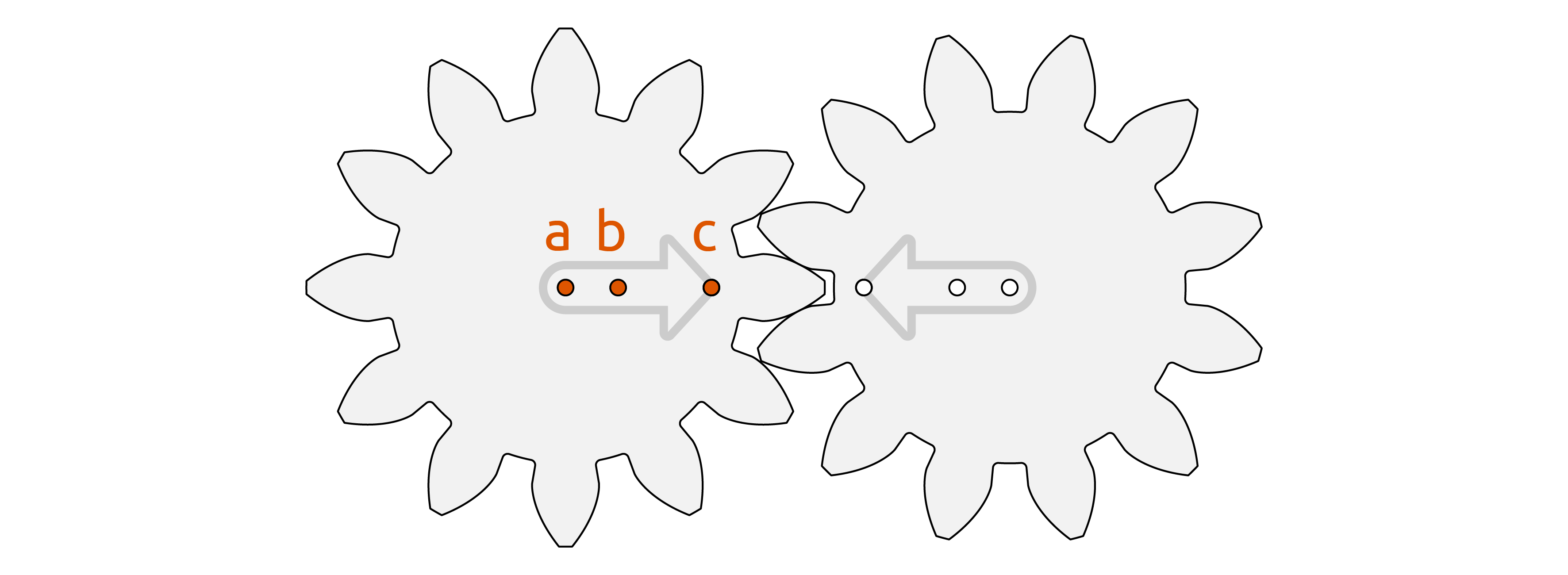
Ook onze tandwielen hebben meer gaatjes dan je misschien op het eerste zicht zou verwachten; we leggen even uit waarom aan de hand van onderstaande tekening.
- Het gaatje ‘a‘ is het gaatje dat je zou verwachten: het middelpunt van je tandwiel. Dit gebruik je door een van de voorziene pinnen in een gat naar keuze van je plaat te stoppen en je tandwiel over dat pinnetje te plaatsen.
- Gaatje ‘b‘ spreekt minder voor zich. Dit gat is er om (met behulp van dezelfde pinnen) twee tandwielen op elkaar te leggen en samen te laten draaien. Hiertoe bevestig je één tandwiel op het bord m.b.v. gaatje ‘a‘, plaats je een tweede pin in gaatje ‘b‘ en plaats je het tweede tandwiel over beide pinnen zodat de pijl dezelfde kant uitwijst. In het bijzonder komt de pin in gaatje ‘b‘ niet in een roostergaatje terecht. Voor meer info waarom je twee tandwielen samen wil laten draaien, lees eens het stukje over samengestelde tandwielen.
- Het resterende gaatje ‘c‘ is enkel op de grotere wielen (M, L, XL) aanwezig en geeft je de mogelijkheid om hier een pinnetje in te plaatsen om als handvat te gebruiken. Dit helpt je om een mooi continue draaibeweging uit te voeren zonder het risico je vingers ergens tussen te krijgen.
Terminologie
Tandwielkarakteristieken
Het duidelijkst af te lezen van een tandwiel zijn de binnen- en buitencirkel (in het Engels root circle en addendum circle), hieronder in het blauw. Helaas zijn die twee eigenlijk niet zo veelzeggend. Merk bijvoorbeeld op dat de binnencirkel van het ene tandwiel niet raakt aan de buitencirkel van de andere! Belangrijker zijn de hypothetische cirkels langs dewelke de tandwielen elkaar raken, hieronder in het oranje. Zo’n cirkel wordt de steekcirkel (pitch circle) genoemd.

Voor een tandwiel definiëren we de volgende grootheden.
- Het aantal tanden: dit spreekt voor zich. We noteren dit als \(z\).
- De steekcirkeldiameter (pitch diameter): de diameter van de steekcirkel. We noteren de diameter als \(d\) en de straal als \(r\).
- De steek (circular pitch): de afstand tussen twee tanden, gemeten langs de steekcirkel. We noteren dit als \(p\).
- De modulus (module): de verhouding tussen de steekcirkeldiameter en het aantal tanden. We noteren dit als \(m\).
Tussen deze grootheden gelden de relaties
\[p = \frac{\pi\cdot d}{z} = \frac{2\pi\cdot r}{z} = \pi\cdot m. \tag{1}\]

Technische voetnoot over de Engelse termen. In het Engels zijn zowel circular pitch (zoals hier gedefinieerd) als diametral pitch gangbare termen, beide geregeld afgekort als pitch. Echter, laatstnoemde is de verhouding tussen het aantal tanden en de steekcirkeldiameter, en is dus — verwarrend genoeg — gelijk aan \(\pi\) gedeeld door de circular pitch.
Tandwielen in beweging
We werken doorheen deze pagina onder de assumptie dat tandwielen eenparig roteren, i.e. met constante snelheid. Voor zo’n tandwiel in beweging definiëren we de volgende grootheden.
- De hoeksnelheid (angular speed): de hoek waarover het tandwiel draait per tijdseenheid. We noteren dit als \(\omega\) en drukken de hoek uit in radialen.
- De periode (period): de tijd die het kost om één volledige omwenteling af te leggen. We noteren dit als \(T\).
- De frequentie of het toerental (frequency): het aantal omwentelingen per tijdseenheid. We noteren dit als \(f\). Merk dus op dat \(f = \frac{1}{T}\).
Tussen deze grootheden gelden de relaties
\[\omega = \frac{2\pi}{T} = 2\pi\cdot f. \tag{2}\]
Merk op dat een punt op het tandwiel op afstand \(x\) van het centrum feitelijk roteert aan een snelheid \(x\cdot\omega\) (mits de hoeksnelheid \(\omega\) uitgedrukt in radialen). Inderdaad, een punt aan de buitenkant van het tandwiel heeft bij rotatie een grotere snelheid dan een punt nabij het centrum.
Technische voetnoot over de Engelse termen. In het Engels noemt men de angular speed doorgaans de angular frequency — niet te verwarren met simpelweg de frequency die een factor \(2\pi\) scheelt. Om het onderscheid te maken, preciseert men laatstnoemde soms expliciet als de ordinary frequency.
Tandwielen en krachten
Wanneer het gaat over kracht uitgeoefend op of door een tandwiel, zijn enkele extra concepten nodig. Herinner je het hefboomprincipe: een kleine kracht in combinatie met een grote afstand t.o.v. een draaipunt kan worden omgezet in een grotere kracht op kleinere afstand. Een deur sluiten gaat een pak eenvoudiger als je duwt aan de klink dan vlakbij de scharnieren! Net zoals de snelheid hangt dus ook de precieze kracht uitgeoefend door een tandwiel af van de afstand tot het middelpunt. In praktijk is meestal de kracht aan de “rand” (i.e. langs de steekcirkel) het meest betekenisvol. Desalniettemin is het nuttig om ook een extra grootheid in te voeren die constant is op het hele tandwiel. We definiëren ter referentie de volgende grootheden.
- We noteren de kracht uitgeoefend langs (de raaklijn aan) de steekcirkel als \(F\).
- Het koppelmoment of kortweg moment (torque): het product \(r\cdot F\). We noteren dit als \(\tau\). Merk dus op dat het moment van het tandwiel ook kan berekend worden uit andere punten, als het product van de kracht in dat punt met de afstand tot het middelpunt.
- Het vermogen (power): de hoeveelheid overgedragen energie per tijdseenheid. We noteren dit als \(P\).

Over het algemeen wordt het vermogen berekend als de kracht in een punt vermenigvuldigd met de snelheid in dat punt. Gelet op het voorgaande roteert een punt op de steekcirkel met een snelheid gelijk aan \(r\cdot\omega\), zodat
\[P = F \cdot r \cdot \omega = \tau\cdot\omega. \tag{3}\]
Technische voetnoot over vectoren. In de mechanica worden kracht, afstand, snelheid, moment … traditioneel uitgedrukt door middel van vectoren. Het moment wordt dan gedefinieerd als een vectorproduct \(\vec\tau = \vec r \times \vec F\). Hier zijn we enkel geïnteresseerd in de groottes van die vectoren en in de kracht langs de raaklijn aan de steekcirkel (loodrecht op de voerstraal), zodat
\[\tau = \bigl\lVert\vec\tau\bigr\rVert = \bigl\lVert\vec r\times\vec F\bigr\rVert = \bigl\lVert\vec r\bigr\rVert\cdot\bigl\lVert\vec F\bigr\rVert = r\cdot F.\]
Technische voetnoot over de Engelse termen. Wie al eens in het Engels en het Nederlands leest, kan verward raken over de termen moment en momentum, of torque en torsie.
- Moment (moment) in zijn algemeenheid is niet veel meer dan een product van een positievector met een andere fysische grootheid, zoals een kracht, inertie, elektrische lading, impuls …
- Een speciaal geval daarvan is koppelmoment (torque), die het ‘roterend effect’ van een kracht uitdrukt in een systeem waar enkel een rotatiebeweging optreedt of waar we enkel in die roterende beweging geïnteresseerd zijn.
- Nog iets anders is impuls (momentum), gekend van wetmatigheden zoals ’the conservation of angular momentum’. Impuls beschrijft de energetische staat van een systeem en wordt bepaald als een product van massa en snelheid.
- Torsie (torsion) is dan weer een bezorgdheid van materiaalkundigen en beschrijft de vervorming van een object die optreedt als gevolg van een inwerkende kracht met ‘roterend effect’.
Principes en voorbeelden
Draairichting
Een enkele tandwieloverbrenging keert de rotatierichting om. Dat betekent dat in een keten van meerdere tandwielen de rotatierichtingen alterneren. In onze set valt dit eenvoudig vast te stellen dankzij de voorziene pijltjes naar de tanden.

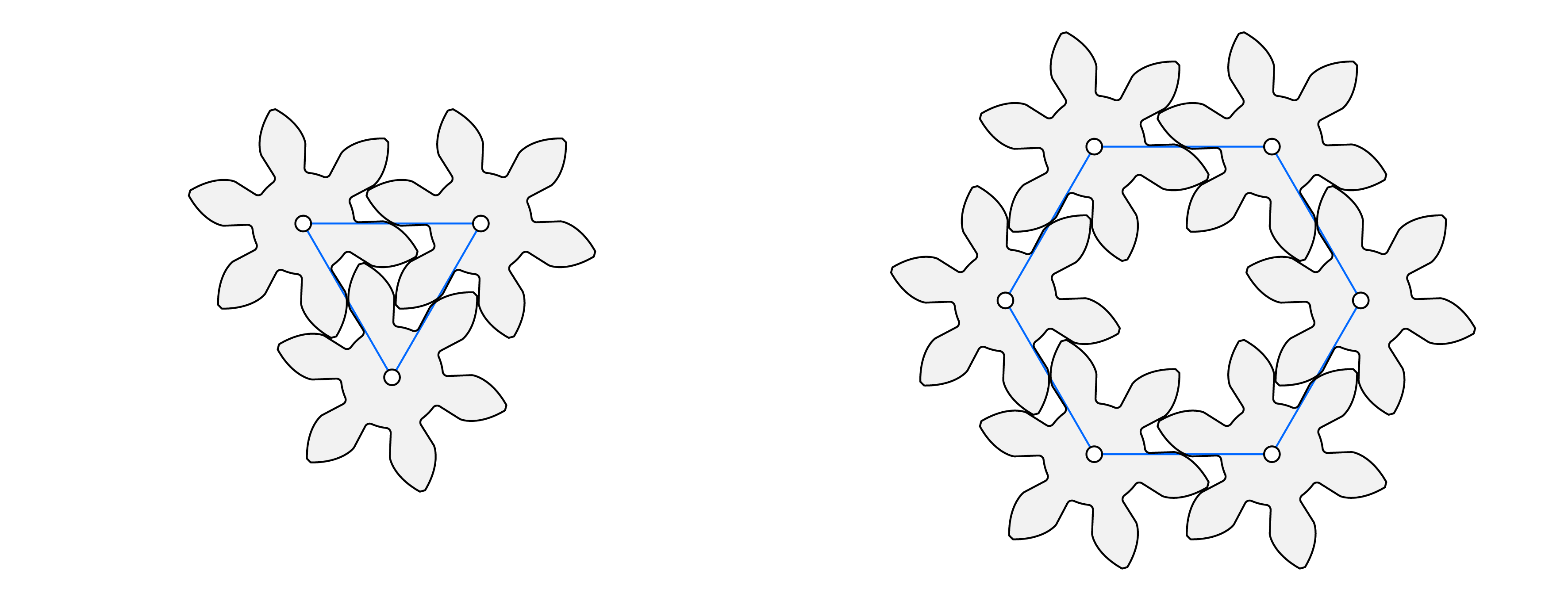
Deze eigenschap heeft alvast een eenvoudig gevolg: een gesloten tandwielketen (waar het eerste en het laatste tandwiel opnieuw aan elkaar geschakeld zijn) moet noodzakelijkerwijze uit een even aantal tandwielen bestaan om te kunnen roteren. Zo is het voorbeeld hieronder met drie tandwielen rigide, terwijl het voorbeeld met zes tandwielen wél werkt.
Overbrengingsverhouding
Twee tandwielen hoeven niet dezelfde grootte te hebben om in elkaar te passen. Belangrijk is dat ze dezelfde steek hebben (of equivalent dankzij vergelijking (1), dezelfde modulus) en dat hun steekcirkels elkaar raken. Aaneengeschakelde tandwielen van verschillende diameter hebben dan ook een verschillend aantal tanden en roteren niet met eenzelfde hoeksnelheid, frequentie of periode. Het verband wordt uitgedrukt met de zogenaamde overbrengingsverhouding (speed ratio of gear ratio): de verhouding \(R\) tussen de twee hoeksnelheden. Dankzij vergelijking (2) geldt voor deze overbrengingsverhouding dat
\[R = \frac{\omega_1}{\omega_2} = \frac{f_1}{f_2} = \frac{T_2}{T_1}\]
(waarin de indices verwijzen naar de tandwielen). Om deze grootheid in verband te brengen met de steekcirkeldiameters en de aantallen tanden, beschouw het raakpunt van de twee steekcirkels. Dat punt roteert met eenzelfde snelheid \(v\) ten opzichte van beide tandwielen; zoniet zou een tand van het ene wiel op den duur een tand van het andere wiel inhalen en sluiten de tandwielen niet correct aan elkaar. We kunnen deze snelheid dus op twee manieren berekenen als
\[v = r_1 \cdot \omega_1 = r_2 \cdot \omega_2.\]
Daaruit volgt dat de overbrengingsverhouding ook voldoet aan
\[R = \frac{r_2}{r_1} = \frac{d_2}{d_1} = \frac{z_2}{z_1}.\]
Nog anders uitgedrukt kunnen we de krachten uitgeoefend door de twee tandwielen vergelijken. De wet van behoud van energie betekent dat beide tandwielen over hetzelfde vermogen beschikken — in de veronderstelling dat er geen energieverlies optreedt door wrijving in het systeem. Dankzij vergelijking (3) volgt dat de overbrengingsverhouding ook voldoet aan
\[R = \frac{\tau_2}{\tau_1}.\]
Zo volgt bijvoorbeeld dat een wiel met dubbel zo veel tanden juist half zo snel zal draaien, of er juist dubbel zo lang over zal doen om een volledige omwenteling te maken als het aandrijvende wiel. Maar dit wiel zal dan wel beschikken over een dubbel zo groot moment. De overbrengingsverhouding wordt dan ook vaak het mechanisch voordeel (mechanical advantage) genoemd.
Wanneer nog een derde tandwiel wordt toegevoegd, is er sprake van twee overbrengingsverhoudingen: enerzijds \(R_{12}\) tussen het eerste en tweede tandwiel, en anderzijds \(R_{23}\) tussen het tweede en derde tandwiel. Het product van de beide verhoudingen geeft overbrengingsverhouding \(R_{13}\) voor van het eerste naar het derde tandwiel, aangezien
\[R_{13} = \frac{\omega_1}{\omega_3} = \frac{\omega_1}{\omega_2}\cdot \frac{\omega_2}{\omega_3} = R_{12}\cdot R_{23}.\]
In het voorbeeld hieronder geldt voor de overbrengingsverhoudingen dat \(R_{12} = R_{23} = 2\), zodat het rechtse tandwiel uiteindelijk vier keer trager draait dan het linkse tandwiel.

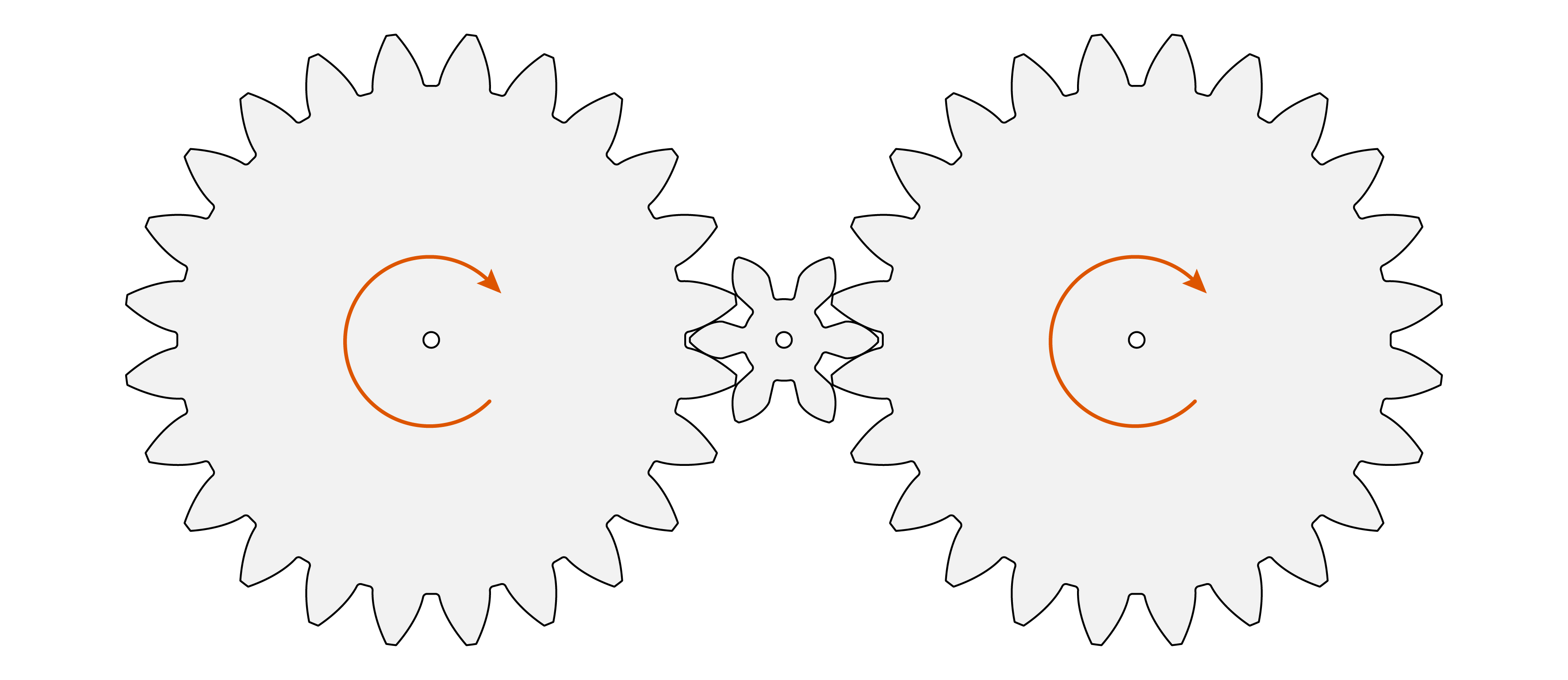
Een toepassing hiervan is het gebruik van een tussentandwiel (idler gear) om rotatie over te dragen zonder verandering van snelheid of richting, zoals in de illustratie hieronder. Ook al draait het tussentandwiel in dit voorbeeld vier keer zo snel, de uiterste tandwielen zijn even groot en draaien dan ook met eenzelfde hoeksnelheid.
Samengestelde tandwielen
Een manier om toch dezelfde hoeksnelheid te forceren bij tandwielen van verschillende afmetingen, is om deze op eenzelfde as aan elkaar te bevestigen (in een nieuwe laag). In onze set kan dat door een extra pin toe te voegen in de voorziene gaatjes vlakbij het centrum van de beide tandwielen. De twee samengestelde tandwielen (compound gears) hieronder draaien bijvoorbeeld met eenzelfde hoeksnelheid, die half zo groot is als de hoeksnelheid van het aandrijvende kleine tandwiel.
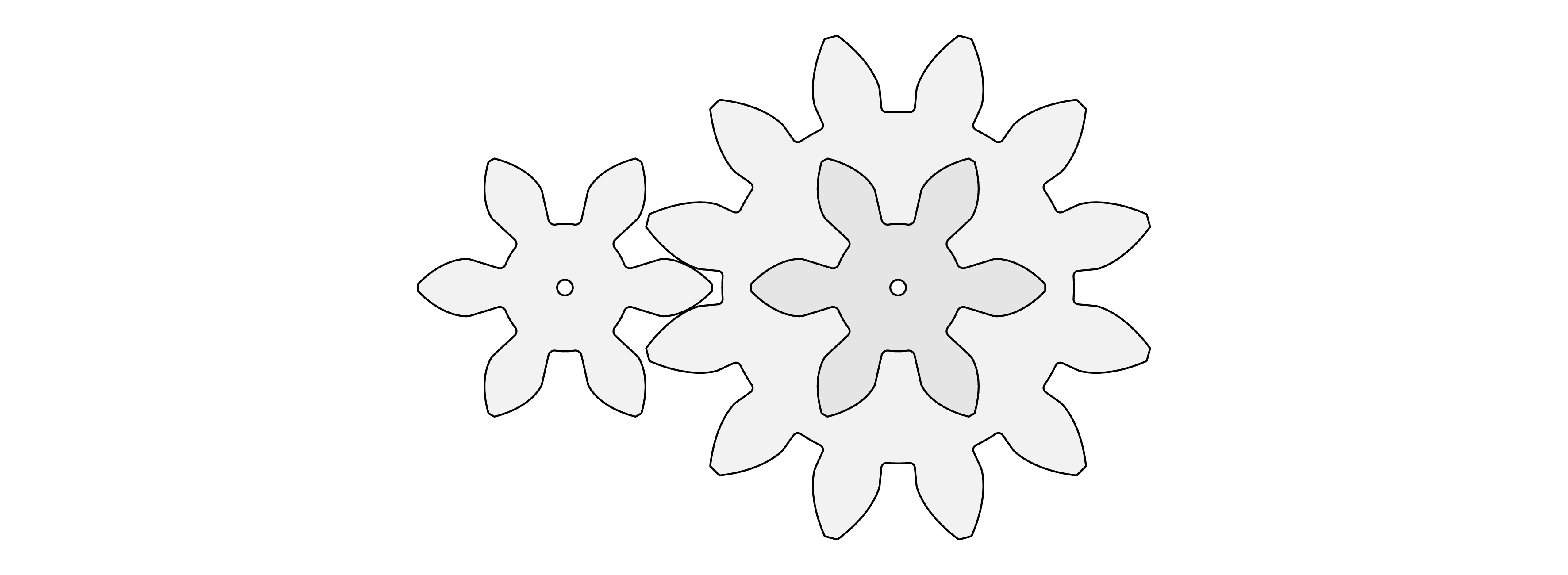
Bemerk dat de twee op elkaar bevestigde tandwielen bovendien beschikken over hetzelfde vermogen en hetzelfde moment. Vergeleken met het eerste kleine tandwiel leidt deze constructie dus tot een tandwiel dat even groot is, maar half zo snel roteert en een dubbel zo groot moment heeft.
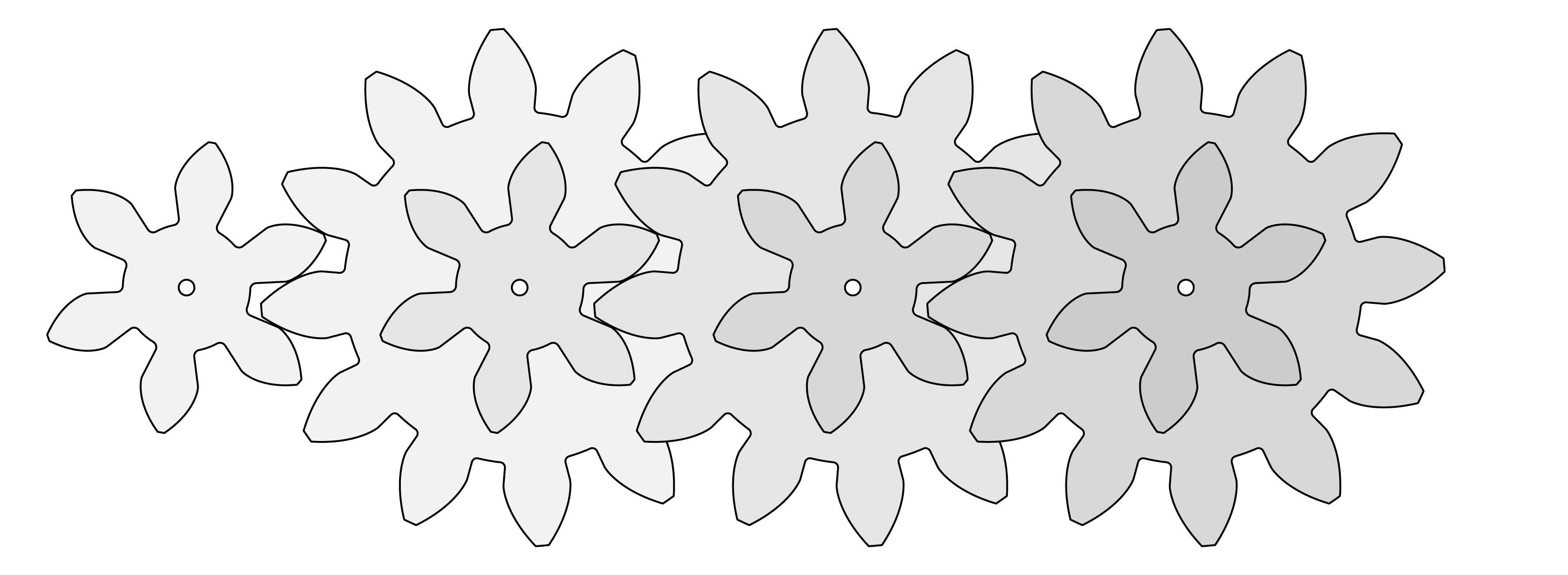
Zo’n reductie kan herhaald worden, zoals hieronder geïllustreerd. Wanneer \(n\) dergelijke samengestelde tandwielen geschakeld worden en de overbrengingsverhouding in elke stap \(R\) bedraagt, dan is de uiteindelijke overbrengingsverhouding na \(n\) reducties gelijk aan \(R^n\) — een mooi voorbeeld van exponentieel verval (in hoeksnelheid).
Door de constructie om te keren en telkens met grotere tandwielen een kleiner wiel aan te drijven, is het mogelijk om ook een exponentiële groei in hoeksnelheid te creëren. Bemerk echter dat in dat geval ook de nodige kracht om het geheel aan te drijven, exponentieel toeneemt, omwille van vergelijking (3).
Nog een observatie: twee identieke samengestelde tandwielen in omgekeerde positie zoals hieronder mogen dan wel precies op elkaar aansluiten, ze vormen geen functionele tandwielketen. Waarom niet?

Wrijving
Tot nog toe hebben we steeds een geïdealiseerd systeem zonder energieverlies in de vorm van wrijving (friction) veronderstelt. Naarmate een keten langer of een constructie complexer wordt, kan het wel eens duidelijk worden dat dat in praktijk anders is: de keten komt al wat moeizamer op gang, of draait met een duwtje niet vlotjes verder …
Een theoretische benadering van wrijving is hoegenaamd niet evident, maar willen je zeker uitdagen om eens te experimenteren. In de set zijn metalen rondellen voorzien, die de wrijving van het hout op de ondergrond oplossen. Er blijft nog steeds wrijving aanwezig: tussen tandwiel, rondel, as en gat in de plaat, maar ook tussen de tandwielen onderling, en zelfs luchtweerstand. In praktijk wordt er daarom gezocht naar materialen met een lagere wrijvingscoëfficient, of wordt er gebruik gemaakt van smeermiddelen zoals olie.
Planeetwielmechanisme
Een planeetwielmechanisme (epicyclic of planetary gearing) is een tandwieloverbrenging waarbij het aandrijvende tandwiel op dezelfde as ligt als het aangedreven tandwiel. Dat wordt mogelijk gemaakt door een constructie met de volgende componenten: een centraal gelegen zonnewiel, daarrond één of meerdere planeetwielen al dan niet gemonteerd op een planeetwieldrager, en tot slot een ringvormig satellietwiel rondom dat langs binnen wordt aangedreven door de planeetwielen.
In het voorbeeld hieronder worden de assen van zowel het zonnewiel als de drie planeetwielen stationair gehouden. Wanneer het zonnewiel wordt aangedreven, dragen de planeetwielen de rotatie over aan het satellietwiel, dat op die manier roteert in de tegengestelde richting als het zonnewiel.
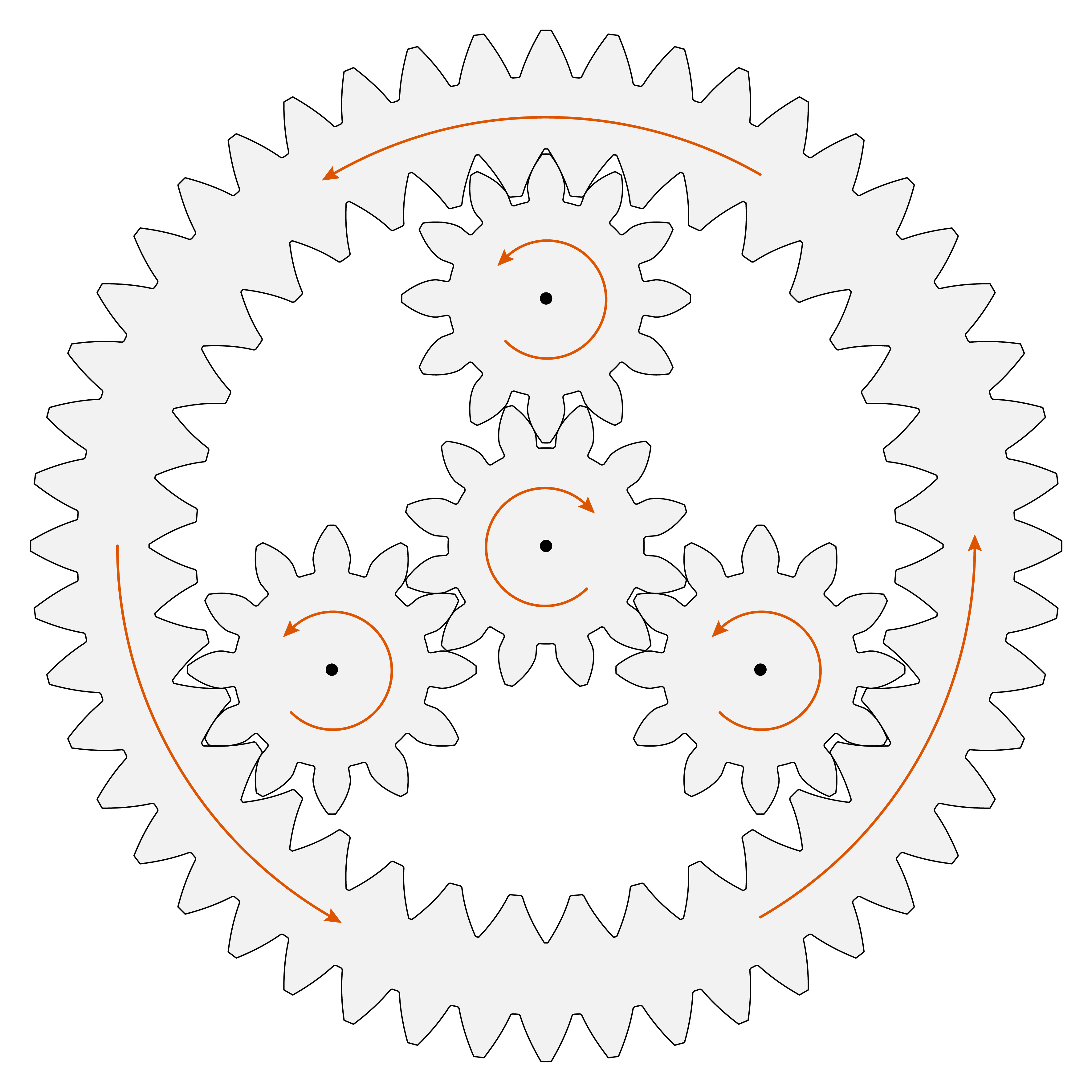
Alternatief kan ook het satellietwiel stationair worden gehouden in plaats van de planeetwielen. In onze set lukt dat door het wiel te bevestigen op de plaat door middel van de drie voorziene gaatjes. Voor een optimaal resultaat worden de planeetwielen dan best onderling vastgehouden door middel van een planeetwieldrager. Het zonnewiel aandrijven doet dan niet alleen de planeetwielen roteren rond hun as, maar ook rond het zonnewiel zelf!

Het verband tussen de hoeksnelheden van de verschillende tandwielen is niet meteen duidelijk, omdat er heel wat rotaties meespelen en verschillende componenten stationair kunnen worden gehouden. In de analyse die volgt, beschouwen we de rotaties van zon, planeten, planeetdrager en satelliet ten opzichte van hun eigen centrum. Beschouw eerst een punt op de steekcirkel van de zon. Enerzijds wordt de snelheid van zo’n punt eenvoudig rechtstreeks gevonden vanuit de straal en hoeksnelheid van het zonnewiel. Anderzijds kunnen we die rotatie ook beschouwen als de superimpositie van twee andere rotaties: datzelfde punt roteert ook ten opzichte van het centrum van een planeetwiel, dat op zijn beurt roteert rondom het centrum van de planeetdrager. Rekening houdend met de draairichtingen geeft dat de vergelijking
\[r_\text{zon}\cdot\omega_\text{zon} = r_\text{drager}\cdot\omega_\text{drager} \;{-}\; r_\text{planeet}\cdot\omega_\text{planeet}\,.\]
Op dezelfde manier kan men de snelheid berekenen in een punt op de (binnenste) steekcirkel van het satellietwiel:
\[r_\text{satelliet}\cdot\omega_\text{satelliet} = r_\text{drager}\cdot\omega_\text{drager} + r_\text{planeet}\cdot\omega_\text{planeet}\,.\]
De straal van de planeetwieldrager kan geëlimineerd worden op twee manieren.
\[r_\text{drager} = r_\text{zon} + r_\text{planeet} = r_\text{satelliet} \;{-}\; r_\text{planeet}\,.\]
Omdat alle tandwielen dezelfde steek hebben, leert vergelijking (1) dat de stralen evenredig zijn met de aantallen tanden. We kunnen de gevonden vergelijkingen dus ook herformuleren naar het volgende stelsel (waarin we de indices afgekort hebben voor de leesbaarheid).
\begin{cases} z_\text{z}\cdot\omega_\text{z} = {\bigl(z_\text{z} + z_\text{p}\bigr)\cdot\omega_\text{d}} \;{-}\; z_\text{p}\cdot\omega_\text{p}\\ z_\text{s}\cdot\omega_\text{s} = {\bigl(z_\text{s} \;{-}\; z_\text{p}\bigr)\cdot\omega_\text{d}} + z_\text{p}\cdot\omega_\text{p} \end{cases}
In praktijk kunnen we zowel het zonnewiel als de drager als het satellietwiel volledig fixeren. Echter, indien de hoeksnelheid van de planeetwielen nul wordt, reduceert alles in essentie tot één groot star systeem dat enkel nog in zijn geheel kan roteren. Dat motiveert om de afhankelijkheid van de planeetwielen te elimineren. Door de twee vergelijkingen op te tellen, blijkt
\[z_\text{z}\cdot\omega_\text{z} + z_\text{s}\cdot\omega_\text{s} = \bigl(z_\text{z} + z_\text{s}\bigr)\cdot\omega_\text{d}.\]
Zo kunnen we de hoeksnelheden van zon, drager of satelliet uitdrukken in termen van de andere hoeksnelheden:
\[\omega_\text{z} = \frac{z_\text{z} + z_\text{s}}{z_\text{z}}\cdot\omega_\text{d} \;{-}\; \frac{z_\text{s}}{z_\text{z}}\cdot\omega_\text{s},\qquad \omega_\text{s} = \frac{z_\text{z} + z_\text{s}}{z_\text{s}}\cdot\omega_\text{d} \;{-}\; \frac{z_\text{z}}{z_\text{s}}\cdot\omega_\text{z},\qquad \omega_\text{d} = \frac{z_\text{z}}{z_\text{z}+z_\text{s}}\cdot\omega_\text{z} + \frac{z_\text{s}}{z_\text{z}+z_\text{s}}\cdot\omega_\text{s}.\]
In het eerste voorbeeld hierboven stonden de planeetwielen vast gemonteerd, wat in deze formules betekent dat de hoeksnelheid van de drager gelijk is aan nul. De overbrengingsverhouding van zonnewiel tot satellietwiel is dan gelijk is aan
\[R_\text{zs} = \Bigl\lvert\frac{\omega_\text{z}}{\omega_\text{s}}\Bigr\rvert = \frac{z_\text{s}}{z_\text{z}}.\]
Daarin gebruiken we de absolute waarde, omdat de rotatierichting verschilt en de hoeksnelheden dus tegengesteld teken hebben. Merk op dat deze verhouding altijd groter is dan één, omdat de satelliet een grotere diameter en dus meer tanden moet hebben dan de zon. Met andere woorden, deze constructie levert altijd een reductie in hoeksnelheid op.
In het tweede voorbeeld is de hoeksnelheid van de satelliet gelijk aan nul, zodat
\[R_\text{zd} = \Bigl\lvert\frac{\omega_\text{z}}{\omega_\text{d}}\Bigr\rvert = \frac{z_\text{z}+z_\text{s}}{z_\text{z}}.\]
Opnieuw is deze verhouding altijd groter dan één en vinden we een reductie in hoeksnelheid.
Mochten we tot slot het zonnewiel volledig gefixeerd houden, dan voldoet de overbrengingsverhouding van drager tot satellietwiel aan
\[R_\text{ds} = \Bigl\lvert\frac{\omega_\text{d}}{\omega_\text{s}}\Bigr\rvert = \frac{z_\text{s}}{z_\text{z}+z_\text{s}}.\]
Deze verhouding is steeds kleiner dan één, wat betekent dat het satellietwiel sneller zal draaien dan de planeetdrager.